|
従来の「ステレオカメラ」は、左右のカメラ画像を直接マッチングするので画像に高い精度が必要となり、必然的に演算コストも膨大になります。しかも、検出範囲を広げると、近距離がマッチングしにくいというパラドックスが存在します。
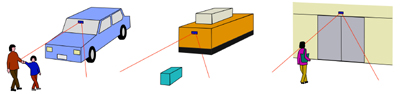
弊社の「TopVision」システムは、左右の画像から距離画像(=平面図)を作成した後にマッチングを行います。
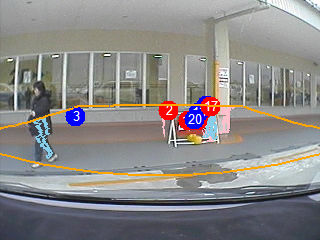
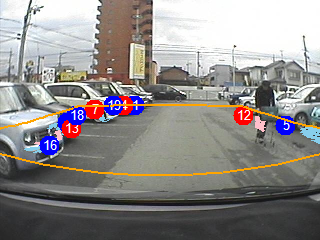
背の高い障害物には、左右のカメラの視差が発生しますが、陰や路面のパターンなどは、視差が発生しないので、結果として背の高い障害物のみが検出されます。
この時、前述の平面図より距離を測定できます。
又、演算コストが安いので組込用途で使用できます。
|